1 Введение
За последнее десятилетие роботизированная магнитная навигация (РМН) превратилась в перспективную технологию для широкого спектра минимально инвазивных хирургических процедур. [ 1 ] В РМН магнитная навигационная система (МНС) точно контролирует 3D-ориентацию магнитного тела с помощью магнитных полей. Эти поля могут генерироваться либо движущимся постоянным магнитом вблизи пациента, либо неподвижным массивом управляемых током электромагнитных катушек, которые вместе создают произвольное магнитное поле в желаемой точке пространства. [ 2 ] В обоих случаях РМН имеет преимущество в том, что напрямую манипулирует дистальным кончиком медицинского устройства (а не косвенно через тяговые провода или другие традиционные средства), что позволяет устройствам быть намного меньше и более гибкими, снижая риск травмы и улучшая ловкость, достижимость и точность. [ 3 , 4 ]
Другим фундаментальным преимуществом RMN является то, что врач может управлять устройством извне операционной. Эта возможность телехирургии может также выходить за пределы локальной больничной сети, позволяя управлять роботизированной системой из любой точки мира, имеющей доступ к Интернету. В дополнение к таким преимуществам, как новые методы дистанционного хирургического обучения и наставничества, телехирургия может обеспечить немедленную хирургическую помощь в отдаленных районах. Это особенно полезно для срочных процедур и для специализированных операций, где местный опыт недоступен.
Несколько систем уже продемонстрировали эффективность телехирургии в таких областях, как лапароскопия и нейрохирургия, [ 5 ] а потенциал РМН для телехирургии был недавно продемонстрирован Нельсоном и соавторами для нейроваскулярных процедур in vitro. [ 6 ] Гастроэнтерология — это область, особенно хорошо подходящая как для РМН, так и для телехирургии. Относительно большой размер гастроинтестинальных (ЖК) эндоскопов позволяет использовать соответственно большой объем встроенных магнитов, максимизируя стабильность и достижимость устройств. Процедуры, как правило, не требуют разрезов, что снижает необходимость в опытном враче у постели пациента и тем самым упрощает развертывание в удаленных условиях. Чтобы продемонстрировать и оценить телеоперативные возможности РМН в этом контексте, была проведена гастроскопия in vivo на модели свиньи, во время которой оператор в Цюрихе, Швейцария, успешно управлял магнитным эндоскопом внутри модели свиньи в Гонконге (9300 км от Цюриха).
Далее в Разделе 2 обсуждаются ключевые аспекты статуса телехирургии и возможности, созданные с использованием РМН в этом контексте, в том числе для применения в гастроэнтерологии. Раздел 3 представляет собой исследование случая телеуправляемого магнитного эндоскопа для проведения гастроскопии на живой свиной модели. Результаты этого исследования обсуждаются в Разделе 4 и используются для дальнейшего изучения более широкого статуса и последствий телехирургии на основе РМН в рамках гастроэнтерологии и за ее пределами.
2. Современное развитие телехирургии и возможности роботизированной магнитной навигации
В 2001 году «Операция Линдберга» профессора Мареско впервые продемонстрировала техническую осуществимость дистанционной телехирургии, когда он провел холецистэктомию дистанционно из Нью-Йорка в Страсбург. [ 7 ] С тех пор прогресс в области телекоммуникационных технологий и в нашем понимании технических и этических проблем, связанных с телехирургией, сделал дистанционные процедуры все более осуществимыми. [ 8 , 9 ] Несмотря на это, внедрение телехирургии происходит медленно, и количество дистанционных процедур, выполняемых ежегодно, остается довольно ограниченным.
Телеуправляемая система состоит из консоли контроллера, используемой оператором для управления и мониторинга системы, и роботизированного агента, который отображает команды оператора в виде действий в операционной. Консоль контроллера включает пользовательский интерфейс, позволяющий оператору контролировать процедуру, и одно или несколько устройств ввода (например, клавиатура/мышь, джойстик и т. д.). Роботизированный агент может представлять собой любую комбинацию приводов и датчиков, подходящую для выполнения желаемой процедуры.
Характер соединения между пультом управления и роботизированным агентом может быть разным. Операция Линдберга включала сотрудничество с телекоммуникационными компаниями для установления выделенного и прямого жесткого оптоволоконного соединения между Страсбургом и Нью-Йорком, достигая задержки всего 155 мс. [ 7 ] Распространение Интернета после этой работы и быстро расширяющаяся глобальная беспроводная сеть открыли ряд альтернатив. В отдаленных районах, где отсутствует достаточная сетевая инфраструктура, беспроводные альтернативы, такие как 5G, являются многообещающими, и даже спутниковая связь была продемонстрирована как потенциал для телехирургии, хотя задержки остаются относительно высокими. [ 10 ]
В конечном итоге телехирургия может значительно расширить доступ к хирургической помощи, создав сеть телеуправляемых роботизированных платформ, тем самым способствуя глобальному распространению хирургического опыта и знаний. [ 11 , 12 ] Однако телехирургия имеет свой собственный уникальный набор проблем. Крайне важно установить надежное высокоскоростное сетевое соединение между консолью оператора и роботизированным агентом, что может быть сложной задачей в сетях с различными ограничениями безопасности. Связь между удаленным врачом и местным вспомогательным персоналом также имеет решающее значение. Врач должен иметь возможность управлять роботизированным агентом с точностью и точностью, достаточными для того, чтобы соответствовать или превосходить то, чего они достигли бы локально. Кроме того, традиционные хирургические роботы (например, ZEUS и da Vinci) используют роботизированные руки, и необходимо соблюдать осторожность, чтобы избежать столкновений робота с пациентом, персоналом или оборудованием.
Продолжающиеся исследования по внедрению платформ RMN в контексте телехирургии направлены на смягчение этих проблем. По сравнению с традиционными хирургическими роботами, MNS, использующая электромагнитные катушки, не имеет движущихся частей. Магнитные инструменты также можно сделать чрезвычайно мягкими, что снижает риск повреждения тканей во время навигации. Возможность для RMN в телехирургии, которая остается в значительной степени неиспользованной на сегодняшний день, заключается в ее потенциале для обеспечения высокой универсальности процедур, которые могут быть выполнены с помощью этой технологии. Поскольку MNS генерирует произвольные магнитные поля в пространстве, ее можно использовать для управления широким спектром устройств в различных масштабах и уровнях сложности. Хотя это хорошо известное преимущество RMN, [ 2 ] оно еще не было использовано для телехирургии, где одна платформа могла бы использоваться для выполнения различных процедур в различных хирургических специальностях, дистанционно управляемых различными экспертами, расположенными по всему миру.
В следующих разделах мы проиллюстрируем эту перспективу с помощью исследования случая использования Navion, клинически готовой и портативной MNS, [ 13 , 14 ] для выполнения телеуправляемой магнитной гастроскопии in vivo на модели свиньи. Ранее Navion использовался для выполнения телеуправляемой тромбэктомии in vitro. [ 6 ] Это демонстрирует возможность использования одной системы как для телеуправляемых нейроваскулярных, так и для желудочно-кишечных вмешательств, двух классов процедур со значительными различиями в их технических требованиях и навигационных модальностях при выполнении традиционным способом.
3. Исследование случая телеуправляемой магнитной гастроскопии на живой модели свиньи
3.1 Экспериментальная часть
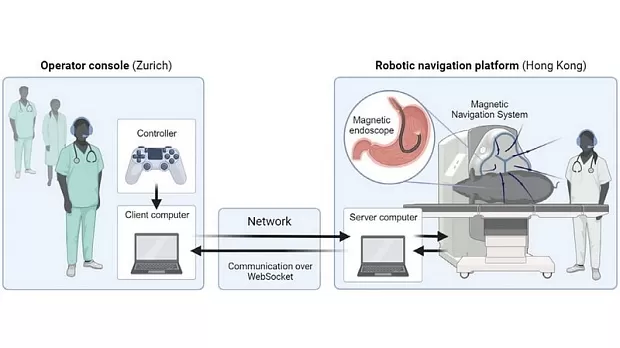
Обзор телеуправляемой установки, использованной в данном исследовании, представлен на рисунке 1 .
Рисунок 1
Открыть в просмотрщике рисунковСиловая установка
Обзор настройки телеуправления.
3.1.1 Программное обеспечение и структура телеуправления
Для установления надежного удаленного соединения для телехирургии прикроватный серверный компьютер установил проводную связь с Navion (протокол TCP/IP), а также с эндоскопической камерой и роботизированным выдвижным устройством (протокол USB). Клиентский компьютер в Цюрихе использовался в качестве пульта оператора для взаимодействия с роботизированной системой через Интернет. Оба компьютера работают под управлением Ubuntu 20.04 и специальной программной среды на основе операционной системы робота (ROS). Связь между пультом оператора и роботизированной системой была установлена через веб-сокет через стандартные интернет-соединения обоих учреждений. На сервере работал веб-сокет rosbridge, к которому клиент подключался с помощью программного обеспечения на основе roslibpy. Задержка связи между сервером и клиентскими компьютерами оценивалась с использованием временных меток ROS.
3.1.2 Пользовательские интерфейсы
На сервере и клиентских компьютерах отображался графический пользовательский интерфейс на основе RViz (визуализация ROS). Интерфейс обеспечивал 3D-визуализацию Navion и генерируемых магнитных полей, а также изображение с эндоскопической камеры в реальном времени. Направление магнитного поля контролировалось с помощью стандартного джойстика-контроллера (PlayStation 3 Move Navigation Controller, Sony).
3.1.3 Роботизированная магнитная навигационная платформа
Платформа RMN, используемая в этой процедуре, основана на Navion, MNS, включающей три высокоплотных электромагнитных катушки с жидкостным охлаждением. [ 13 , 14 ] Эта платформа включает в себя необходимую электрическую аппаратуру управления и программные и аппаратные пользовательские интерфейсы как для локальной, так и для удаленной работы системы. Роботизированная платформа была установлена в гибридной операционной в Центре медицинской робототехники Multi-Scale в Гонконге. Комната была оборудована системой рентгеновской визуализации с С-дугой (Artis Zeego, Siemens), которая была оценена с Navion MNS до процедуры для обеспечения совместимости.
3.1.4 Магнитный эндоскоп и периферийные устройства
Эндоскоп, используемый для этой процедуры, изображен на рисунке 2. Он имеет внешний диаметр 4,25 мм и длину 1,25 м. Сочлененная дистальная секция длиной 85 мм со встроенными постоянными магнитами заканчивается дистальным наконечником, содержащим камеру (OVM6946, OmniVision), встроенное освещение, промывочный канал для очистки линзы эндоскопа и рабочий канал. Освещение обеспечивалось акриловыми оптическими волокнами, подключенными проксимально к медицинскому источнику белого света (Visera Elite II OTV-S300, Olympus). Рабочий канал диаметром 1,2 мм можно использовать для инсуффляции желудка и проведения биопсии с использованием биопсийных щипцов с внешним диаметром 1,0 мм (биопсийные щипцы SpyBite Max, Boston Scientific). Введение и извлечение эндоскопа можно контролировать роботизированным способом с помощью моторизованного выдвижного устройства, установленного на хирургической руке.
Рисунок 2
Открыть в просмотрщике рисунковСиловая установка
Описание магнитного эндоскопа.
3.1.5 Модель свиньи
Исследование in vivo проводилось на седированной модели свиньи весом 30 кг (Sus Scrofa, возраст 5 месяцев), которая была подвергнута эвтаназии после процедуры. Животное голодало в течение 12 часов, а его желудок был опорожнен и очищен незадолго до начала процедуры с помощью обычного гастроскопа (GIF-1200N, Olympus). Обычный гастроскоп также использовался в сочетании с магнитным эндоскопом на протяжении всей процедуры, чтобы обеспечить дополнительный эндоскопический обзор для оценки производительности, размещения и движения магнитного эндоскопа. Хотя магнитный эндоскоп был разработан для введения трансназально пациентам-людям, устройство вводилось через рот модели свиньи из-за существенной разницы в оториноларингологической анатомии. Животное помещалось в боковое положение на операционном столе, его вентральная поверхность была обращена к внешней поверхности электромагнитов Navion (см. Рисунок 1 ).
3.1.6 Рабочая область магнитной навигации
Важно отметить разницу между рабочим пространством системы MNS и рабочим пространством традиционного роботизированного привода. В то время как рабочее пространство руки робота было четко определено его пределами движения, не было никаких дискретных границ для рабочего пространства магнитной системы. Boehler et al. установили структуру для определения магнитного рабочего пространства как набора положений, в которых выбранная величина поля может быть достигнута в любом направлении. [ 15 ] Определение рабочего пространства в данном случае включает физическое поведение эндоскопа и требования процедуры, и здесь оно определяется как область в пространстве, где предопределенная навигационная задача, специфичная для эндоскопических процедур (ретрофлексия), может быть выполнена при ограничениях максимальных электрических токов 45 А в каждом электромагните. Наконец, необходимо убедиться, что желудок животного находится в пределах магнитного рабочего пространства. Правильное размещение животного было достигнуто с помощью предоперационной рентгеновской визуализации, чтобы гарантировать, что эндоскоп оставался в пределах рабочего пространства Navion, когда он находился в желудке животного.
3.2 Результаты
3.2.1 Рабочее пространство и навигация
Магнитное рабочее пространство было рассчитано с учетом задачи создания минимальной величины магнитного поля в любом направлении в пространстве (см. Рисунок 3 ). Результаты показывают, что достижимое рабочее пространство для величины поля 10 мТл содержалось в оболочке размером 27 × 43 × 45 см перед катушками. Экспериментально подтверждено, что при этой величине магнитного поля был получен максимальный угол изгиба 95°. Это означает, что когда кончик эндоскопа находится в этом объеме, его ориентация может контролироваться магнитным способом до этого максимального угла. Эта оболочка уменьшается в размере при рассмотрении более высоких величин, при этом допуская более высокие максимальные углы изгиба для эндоскопа. При 18 мТл наблюдаются максимальные углы изгиба 162° (см. Рисунок 3B,C ).
Рисунок 3
Открыть в просмотрщике рисунковСиловая установка
Магнитное рабочее пространство Navion MNS, определенное Бёлером и др. [ 15 ] , и соответствующий максимальный угол изгиба магнитного эндоскопа. A) Перспективный вид, B) вид сверху, C) магнитный эндоскоп с максимальным углом изгиба 162° при величине магнитного поля 18 мТл.
Навигационная способность эндоскопа оценивалась качественно путем воспроизведения полного диапазона движения традиционных эндоскопов с использованием in vitro фантомов человеческого желудка (Inhouse, MedicalTrainingTools, SynDaver), как показано в Видео S1, Дополнительная информация. Сначала эндоскоп проводился через желудок, проходя привратник, чтобы достичь двенадцатиперстной кишки. После втягивания эндоскопа в желудок выполнялась ретрофлексия для визуализации дна желудка. В прозрачных моделях навигация контролировалась с помощью внешней камеры, а в непрозрачной модели использовалась только камера эндоскопа. Навигация in vivo контролировалась с помощью встроенной камеры и наблюдалась с помощью обычного гастроскопа (Видео S2, Дополнительная информация). Во всех случаях позиционирование Navion относительно модели животного было таким, что объем желудка был полностью включен в рабочее пространство, изображенное оранжевым цветом на Рисунке 3A,B . Это гарантировало, что магнитное поле 18 мТл может быть создано в любом положении кончика эндоскопа во время его навигации в желудке. Это, в свою очередь, означает, что максимальное отклонение 162° может быть достигнуто магнитным эндоскопом на протяжении всей процедуры (см. Рисунок 3B,C ).
3.2.2 Телеуправление
Телеуправление устройством было продемонстрировано с задержкой менее 300 мс на расстоянии 9300 км (Цюрих—Гонконг). Оператор в Цюрихе смог управлять эндоскопом в Гонконге, одновременно контролируя видеопоток на своем локальном компьютере, без каких-либо существенных трудностей, вызванных задержкой (Видео S3, Дополнительная информация). Максимальная задержка связи во время фаз телеуправления составила 297 мс (среднее: 292,65 мс, стандартное отклонение: 0,96 мс) без значительного ухудшения производительности управления оператором, как и предполагалось в литературе, которая установила, что задержки до 300 мс считаются безопасными для проведения телехирургических операций. [ 7 ]
3.2.3 Ретрофлексия
Ретрофлексия является основополагающим маневром в гастроскопии, при котором кончик эндоскопа поворачивается назад для визуализации дна у входа в желудок. Ретрофлексия считалась важной вехой/целью для этой процедуры, поскольку большие углы изгиба могут быть сложными для магнитных эндоскопов, а успешная ретрофлексия является доказательством того, что диапазон движения магнитного эндоскопа сопоставим со стандартными устройствами. Ретрофлексия была впервые оценена in vitro на моделях человеческого желудка и выполнялась неоднократно (видео S1, дополнительная информация). Полная ретрофлексия магнитного эндоскопа in vivo была успешно достигнута, как было оценено с помощью послеоперационного рентгеновского снимка (см. рисунок 4A ) и была выполнена без побочных эффектов.
Рисунок 4
Открыть в просмотрщике рисунковСиловая установка
Обзор результатов процедуры. A) Послеоперационный рентгеновский снимок (боковой вид, вентральная сторона справа на изображении) после ретрофлексии магнитного эндоскопа (обычный гастроскоп Olympus GIF-1200N был вставлен рядом для справки). B) Биопсия ткани стенки желудка под контролем обычного гастроскопа.
3.2.4 Биопсия
Была проведена биопсия ткани стенки желудка. Она контролировалась с помощью обычного гастроскопа, чтобы получить вид на кончик магнитного эндоскопа и щипцы для биопсии (рисунок 4B и видео S4, дополнительная информация). Образец ткани был легко извлечен и признан пригодным для анализа лечащим врачом.
4 Заключение
Представленное здесь исследование случая подчеркивает несколько важных аспектов телехирургии и использования РМН в этом контексте. Потребность в быстрой и надежной связи оказалась особенно важной в этом случае. Надежные средства аудиосвязи между всеми удаленными и локальными операторами имеют решающее значение для безопасной и эффективной телехирургии. [ 9 ] Биопсия и другие периферические операции в этом случае выполнялись лечащим врачом; однако их также могла выполнять обученная медсестра под руководством удаленного эксперта. В качестве альтернативы автоматизация этих операций могла быть реализована с помощью роботизированных устройств для вставки и приведения в действие инструмента для биопсии и ряда насосов или клапанов для управления инсуффляцией, ирригацией, аспирацией и промывкой, что позволяет дистанционно контролировать все аспекты процедуры.
Хотя это исследование может быть выполнено без средств локализации магнитного эндоскопа, оценка положения и ориентации для магнитно-управляемых устройств может иметь решающее значение в случаях, когда инструменты должны контролироваться в замкнутом контуре без наличия эндоскопической камеры или внешнего медицинского устройства визуализации. Ранние доказательства возможности использования Navion как для приведения в действие, так и для обеспечения локализационных средств с использованием встроенных магнитных датчиков были предоставлены фон Арксом и др. [ 16 ] и создают возможность для дальнейшего расширения оперативных возможностей платформы телехирургии на основе этой MNS.
В целом, технология RMN обеспечивает отличную платформу для телехирургии. Благодаря своей относительно низкой сложности и отсутствию движущихся частей, электромагнитные катушки на основе MNS позволяют избежать многих проблем безопасности традиционных роботизированных приводов, они менее дороги в производстве и проще в установке и обслуживании. Устройства с магнитным наведением также менее сложны, чем их традиционные аналоги. Они также более гибкие, что снижает риск случайного повреждения окружающих тканей.
Эндоскопия ЖКТ является многообещающей точкой входа для телехирургии с поддержкой РМН. Ряд минимально инвазивных процедур ЖКТ, таких как рутинные скрининги рака, в настоящее время недоступны для больших групп населения и могли бы обеспечить реальную пользу. Телеуправляемая платформа РМН в такой области позволила бы удаленному эксперту выполнять эти процедуры и предоставила бы полезную платформу для обучения местных операторов.
Помимо использования для процедур на ЖКТ, телеуправляемая платформа RMN может быть весьма универсальной и использоваться в широком спектре удаленных минимально инвазивных процедур. Navion MNS, использованная в представленном исследовании случая, уже была продемонстрирована для использования при нейроваскулярных вмешательствах, [ 3 , 6 ] абляции сердца [ 17 ] и фетальной хирургии [ 4 ] , что открывает захватывающие перспективы для ее интеграции в универсальную платформу телехирургии в будущем.
Благодарности
Эта работа была поддержана грантом ITC-InnoHK 16312, HKSAR, и Центром многомасштабной медицинской робототехники. Авторы хотели бы поблагодарить Элизабет Зуурмонд за вычитку рукописи, а также ветеринарный и технический персонал Центра многомасштабной медицинской робототехники за помощь в исследовании на животных. Первая фигура была создана с помощью BioRender.com.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов.
Этическое заявление
Исследование на животных было одобрено Комитетом по уходу и использованию институциональных животных (HKSTP) под этическим регистрационным номером 2023-054.
Вклады авторов
Alexandre Mesot : Концептуализация (руководитель); Курирование данных (руководитель); Формальный анализ (руководитель); Исследование (поддержка); Методология (руководитель); Валидация (руководитель); Визуализация (поддержка); Написание — исходный черновик (поддержка); Написание — рецензирование и редактирование (поддержка). Michelle Mattille : Курирование данных (поддержка); Формальный анализ (поддержка); Методология (поддержка); Программное обеспечение (руководитель); Валидация (поддержка). Quentin Boehler : Методология (поддержка); Программное обеспечение (поддержка); Надзор (поддержка); Визуализация (поддержка); Написание — исходный черновик (поддержка); Написание — рецензирование и редактирование (поддержка). Nina Schmid : Исследование (поддержка); Методология (поддержка); Программное обеспечение (поддержка); Валидация (поддержка). Sean Lyttle : Концептуализация (поддержка); Исследование (поддержка); Методология (поддержка); Администрирование проекта (поддержка); Надзор (поддержка); Валидация (поддержка); Написание — оригинальный черновик (поддержка); Написание — рецензирование и редактирование (поддержка). Флориан Химейер : программное обеспечение (поддержка). Шеннон Мелисса Чан : исследование (поддержка); методология (поддержка); надзор (поддержка). Филип Вай Янь Чиу : концептуализация (поддержка); получение финансирования (равный); администрирование проекта (равный); ресурсы (равный); надзор (поддержка); Написание — рецензирование и редактирование (поддержка). Брэдли Джеймс Нельсон : получение финансирования (равный); администрирование проекта (равный); ресурсы (равный); надзор (поддержка); Написание — рецензирование и редактирование (поддержка).
.






")













.jpg)



.png)












Комментарии